




人間の手には、まだまだ可能性がある
WS『ロボット心臓手術の功罪と未来』抄録
医療法人 徳洲会 湘南鎌倉総合病院
心臓血管外科 統括部長 伊藤敏明氏

伊藤敏明氏
共に低侵襲を着地点としながら、ダ・ヴィンチやヒノトリに代表されるロボットと3D鏡視下とではどちらに優位性が認められるのか。この問題は2025年10月23~25の3日間、大阪国際会議場で開かれた「第78回日本胸部外科学会学術集会」でもワークショップ『ロボット心臓手術の功罪と未来』で論議された。ロボット支援手術に興味を示す若い医師が増えているなか、わが国を代表するMICS(Minimally Invasive Cardiac Surgery)の担い手である伊藤敏明氏(医療法人 徳洲会 湘南鎌倉総合病院 心臓血管外科 統括部長)は「ロボットと3D鏡視下MICSの比較」と題して、心臓手術における両者の比較を試みた。要旨を紹介する。
胸骨を切らぬことは「初めの一歩」
3D鏡視下およびロボット支援手術(以下、ロボット)が旧来の開胸手術に対し、共通して優れていると思われている点を僧帽弁、三尖弁手術に限って箇条書きすると、
- 術後疼痛が軽く、社会復帰が早い
- 内視鏡による拡大視野を術者だけでなく助手も共有できる
- 胸骨骨髄炎が起きない
- 創(そう=傷口)が小さく、美容的結果がよい
――といった点があげられると思います。特に女性が僧帽弁手術を受ける場合、創は乳房に隠れるため、腕を上げない限りほとんど分かりません。傷跡を気にする女性には喜ばしいことでしょう。創の小ささは術後の回復を早めるのに役立つため、治療的な効果が高いのも利点です。
低侵襲という一点に着目すれば、胸の骨を全部切らなくても済むこと。メスの及ぶ範囲を極力小さくすることが低侵襲を目指す手技の「初めの一歩」だからです。
総じて、結果に客観的な差はない?
僧帽弁手術(Mitral)に際して、ロボットと3D内視鏡とを比較した論文はいくつもありますが、総じて、結果に客観的な差はないといえます(別記【ロボットと3D内視鏡を比較した参考文献】参照)。
このうち、ニューハート・ワタナベ国際病院の渡邊剛先生の論文(3)は日本のNCDデータベースを利用したものですが、実のところ、ダ・ヴィンチ群の半分は同院の症例で、MICS群は小規模施設を多く含んだ患者群となっています。ロボットのほうがMICSより、遮断、体外循環が短いというのは術者や施設の分布が偏っているため、一般的な常識とは逆の結論となっています。
ハサミで紙を切るときを思い起こす
心臓手術における3D鏡視下とロボットとの優位性をいくつかの切り口で比較してみます。
- 【操作性(操作感)】
-
3D鏡視下では部位の組織の硬さや性状などを器具を通じて感じ取ることができます。これは緻密で微細な操作をする場合、想像以上に重要です。手術の現場に限らず、普通にハサミで紙を切るときのことを思い起こせばよく分かるはずです。
人の手は紙にハサミを入れる際の硬さや、今まさに切れていく感触(テクスチャー)をハサミに伝わる微振動や抵抗感として感じ取っています。その紙がホチキスで留められていれば、針を刃先の引っ掛かりとして感じ取ることも可能です。
「画面からの動きで組織の硬さがある程度分かる」という声をロボットを推す人から聞くことがあります。しかし、3D内視鏡でも画面から確かめることはできます。ロボット用に比べて画質がはるかに良いうえ、器具を通じて抵抗感やテクスチャーを感じられるわけです。
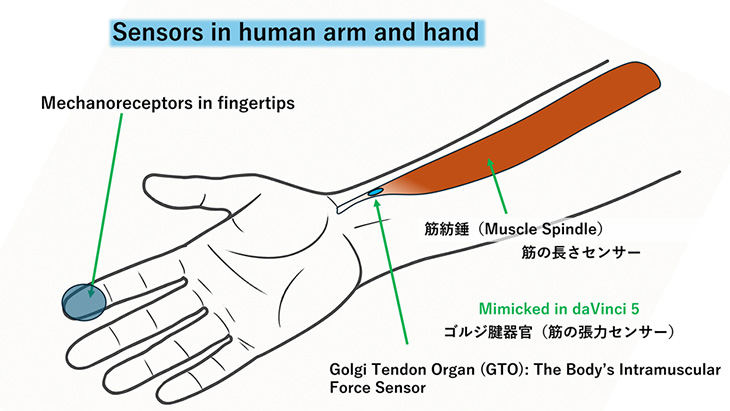
人の腕と手のセンサー
※クリックで拡大
一方、7軸の自由度があるといわれるロボットはアームの先端付近に「手首」があるため、通常の直線的器具では辿り着けない方向から組織に達することができます。この特徴は主に剥離操作で発揮されます。しかし、剥離操作のほとんどない心臓手術では必ずしも大きな利点とはなりません。
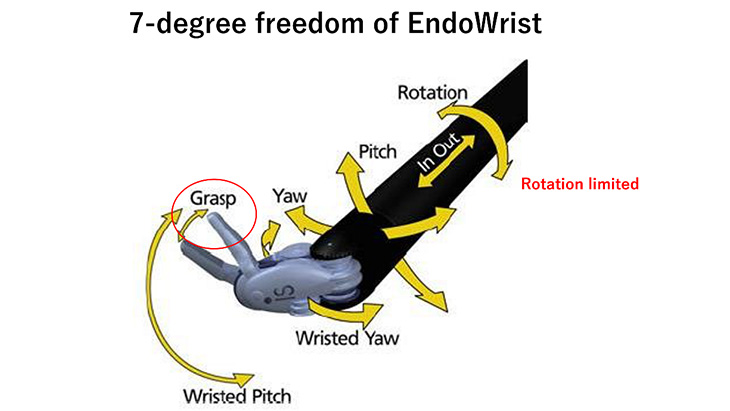
ロボットアームの軸構成
※クリックで拡大
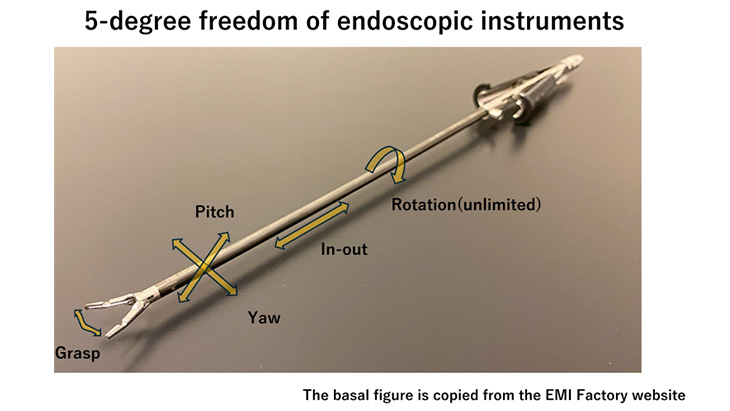
内視鏡器具の軸構成
※クリックで拡大
自由度に関して触れると、ロボットのアームは機構上、胸腔内だけでしか動きません。これに対して、3D内視鏡では体の内外を自在に動ける。そういう自由度があります。インストゥルメントのコントロールはロボットが完全に位置のみに依拠したポジションコントロールであるのに対し、3D内視鏡ではこれに加えて力をコントロールすることができます。
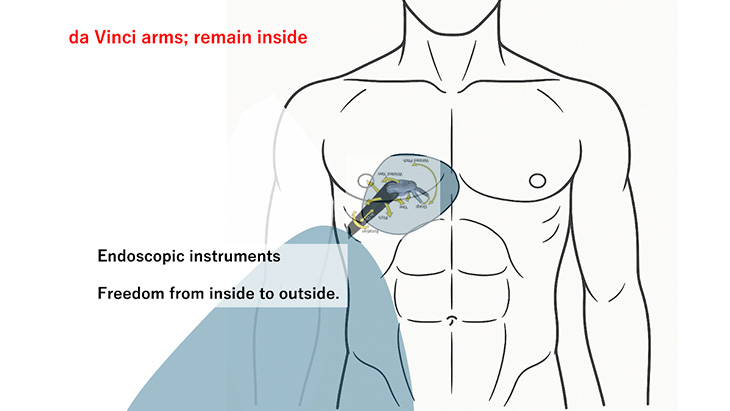
胸腔内における器具の動き
※クリックで拡大
- 【術野の視認性】
-
スペック的な前提を挙げると、ロボットが用いる3Dカメラは直径8ミリ、解像度はHD(ハイビジョン)です。当院がMICSで用いている3Dカメラは直径10ミリ、解像度は4Kです。画素数ではHDの4倍あるということです。
共に光学ズーム機能はなく、デジタルズームのみです。ロボットでは「○○倍の拡大視野」と術野の広さを表現することがありますが、機構的には普通の内視鏡と変わることはありません。
私見では、対象部に近づくから大きくみえるということに過ぎないと思います。その意味で、何を元に倍率を示しているのかの説明がつきません。誤解を恐れずに言えば、対外的な発表の場では、企業の受け売りでなく、技術的詳細を熟知したうえで臨むことが医師としての良心であると考えます。
肝心の視認性に関しては、3D内視鏡とロボットのどちらも利用した経験のある医師は例外なく3D内視鏡のほうがはるかにきれいな画像であると口を揃えます。
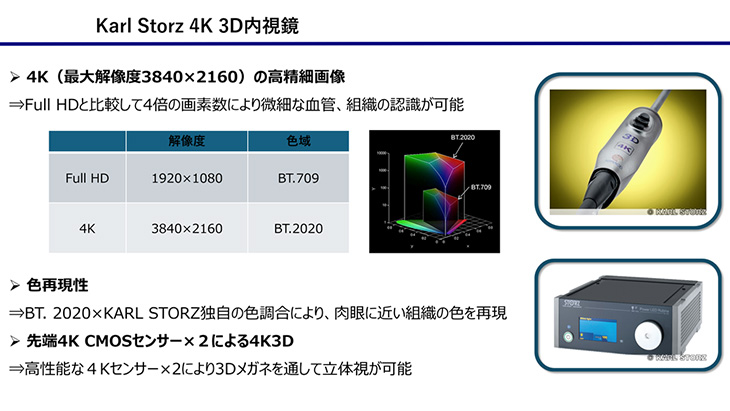
3D内視鏡の画像品質
※クリックで拡大
すでに述べたように、ロボットが用いる3Dカメラのスコープは8ミリであり、先端の2個のレンズの物理的距離が十分に取れていません。つまり、視差が小さいため、あまり立体感がなく、奥行きが圧縮されて平板に見える問題や、HDR(High Dynamic Range)処理がされていないため奥の方が暗く見えるといった問題も生じます。
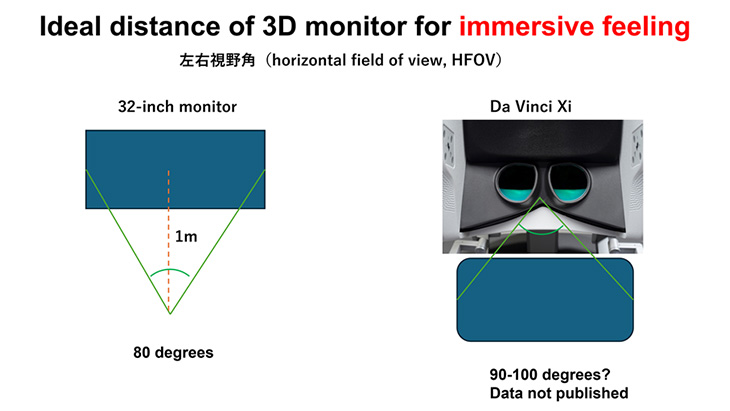
没入感を高めるための3Dモニターの理想的な距離
※クリックで拡大
- 【所要時間】
-
準備は3D MICSが圧倒的に早く、夜間緊急にもまったく問題なく対応できます。器材が比較的安いため、他科との共有を考慮せず必要な時にいつでも使うことができます。
- 【術者依存性(個人の技量や習熟度も含む)】
-
どちらも術者依存性は非常に大きいと思います。基本的に、すべての手術にいえることです。例えば、これまで私が指導したなかで3D MICS僧帽弁形成が3時間以内にコンスタントにできるようになった外科医は5人以上いますが、ロボット(ダ・ヴィンチ)でそのようにできるのは2、3の大規模施設に留まると思います。
MICSのうちでも3D内視鏡手術は術者の技量があれば、助手の経験が少なくても問題なくできますが、ロボットでは手術として成立し ません。術者ばかりでなく、助手に対する依存性も極めて高いからです。

全員が同じ3Dモニターを共有できる
※クリックで拡大
- 【コスト】
-
何年使用できるかにもよりますが、ロボットを3億円で購入して2000回使用したとすると、一例あたり15万円です。1本30~40万円するインストルメントは10回使用して廃棄となります。一つの手術で3~4本使用するので、これもざっと15万円。年間メンテ契約が2000万円ですので、年間200例使用すると一例10万円。その他、アームのドレープ代なども必要です。これらを足すと、一例につき、概算で40~50万円のコストがかかる勘定になります。
一方、内視鏡手術では、3D内視鏡が一式3000万円。仮に1000回使用すれば一例3万円です。器具は同じく1本30万円ほどですが、500回は繰り返し使用できます。一例の手術で4本使用するとして一例2400円です。概算の器具代は一例4~5万円と、ロボットのちょうど10分の1となります。
現在、MICS加算として、一例30万円が正中切開の同等手術に上乗せされます。ロボットではこの部分が完全に消え、コアノット(12個入り18万円のチタン製糸カシメ)を使用すれば赤字となります。ロボットには一定の宣伝集患効果がありますが、普及によって集患効果が薄れると、単に医療の高コスト化を招くだけではないかという論議も起こるでしょう。
率直に言って、こうした高コストで、かつ通常医療との結果に差がない治療はほとんどの国で自費または混合診療による患者自己負担が導入されています。そう考えると、ロボット手術には一件40~50万円の混合診療導入による自己負担が望ましいと考えます。
がん手術ではロボット手術が普通に
ロボットに憧れる若い医師が増えています。そのこと自体に問題はありませんが、腹部外科領域と心臓外科とでは向き合い方が異なると考えます。
主に剥離操作が中心となるがん手術ではロボットのメリットが大きいため、競争によって機材の価格が下がればロボット手術が普通になると思います。現在はロボットを使うことが特殊技能のように思われていますが、手術を簡単にするものであれば、いずれコモディティ化し、特色をアピールすることが難しくなります。
一方、心臓外科では上記のように実際にはメリットが少なく、症例数の問題から若手医師のコンソールでの操作機会はなかなか得られず「万年テーブルサージョン」を務めることに終わるのではないかと危惧します。実際、ロボット手術が導入されている施設のなかでコンソールサージョンが複数育成されている施設は極めて限られています。
僧帽弁手術は完全鏡視下が主流に
低侵襲の心臓手術は今後どのように進展していくのでしょうか。
低侵襲の心臓手術のうちでも僧帽弁手術は完全鏡視下(ロボット含む)が主流となり、正中切開や直視下小切開はあまり行われなくなると見ています。大動脈弁手術に関しては止血の困難性など、安全性の点から僧帽弁手術ほどの普及は見込まれず、30%程度までMICSとなります。
冠動脈バイパス術は完全鏡視下が普及することはなく、結局大きめの左開胸手術をMICS CABGと呼ぶとしても、20%程度までの普及にとどまると予想します。
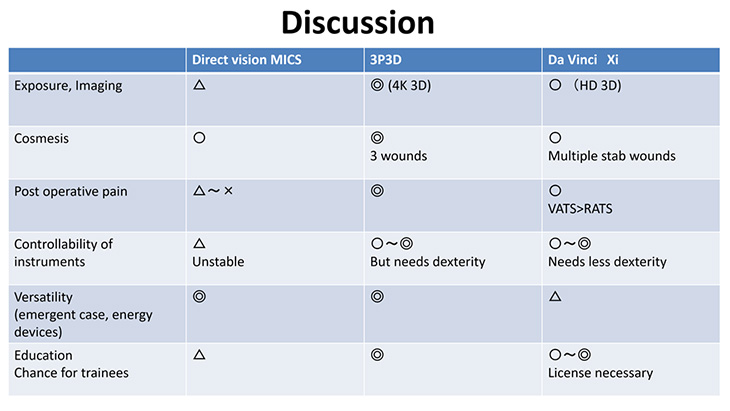
直視下MICS、3D内視鏡、ロボットの考察
※クリックで拡大
今後に限らず現在でもいえることですが、医療事故を招かぬための対策や安全性の確保については(1)手順を固定する(2)出血を未然に 防ぐ(3)時間を焦らない(4)誰かが異常に気づいた時に委縮せず発言できるフラットな環境をつくる――ことが大切だと思います。
最後のスライドは中国で作られた工芸品です。象牙の一つのブロックから内側に18層のフリーローティングのレイヤーを手作業で削り出したものです。人間の手には、まだまだ可能性があるのではないかと思います。
人の手の技が凝縮された象牙の工芸品
※クリックで拡大
- 【ロボットと3D内視鏡を比較した参考文献】
-
Rufa et al., 2023, J Thorac Dis -- 単施設PSM;僧帽弁/二弁修復+AF冷凍凝固:Robotic vs MIMVSで早期〜中期成績は同等(在院・合併症差なし)。PMID: 38249871. PubMed
Zheng et al., 2022, J Card Surg -- Mayo Clinic、PSM;Robotic vs 右小開胸非ロボットMVr:臨床成績は同等、Roboticで遮断時間が延長、在院日数は短縮。PMID: 35989503. PubMed
Watanabe et al., 2025, JTCVS(日本NCD、250施設)-- PSM 577ペア;Roboticは手術/体外循環/遮断時間が短く、退院は早い。安全性は小開胸群と同等。PMID: 38802045. PubMed
Mihaljevic et al., 2011, J Thorac Cardiovasc Surg -- マッチング比較;Robotic vs 右前外側小開胸等:CPB/遮断時間はRoboticで長いが、主要アウトカムは概ね同等。PMID: 21093881. PubMed
Jegaden et al., 2023, Asian Cardiovasc Thorac Ann -- PSM研究のみのメタ解析;ロボ vs ビデオ支援MIMVSで早期死亡・脳卒中等は同等、再開胸/輸血はビデオ支援で少ない、Roboticは手術時間・コスト高。PMID: 36987688. PubMed
Yokoyama et al., 2022, Interact CardioVasc Thorac Surg -- ネットワークMA(胸骨正中 vs MICS vs Robotic);短期はMICSが良好、再手術はMICS>正中、正中とRoboticは差なし(参考)。PMID: 34664809.
プロフィール
伊藤敏明(いとう・としあき)氏略歴
1986年名古屋大学医学部卒業。名古屋大学関連病院ローテート、カナダ・トロント小児病院留学、日本赤十字社愛知医療センター名古屋第一病院などを経て医療法人 徳洲会 湘南鎌倉総合病院に勤務。心臓血管外科専門医認定機構心臓血管外科専門医、日本胸部外科学会指導医、日本外科学会外科専門医・認定医、日本低侵襲心臓手術学会代議員。1962年、長野県生まれ。





