




手術現場で医療支援ロボットを活用するケースが増えている。代表格は米国インテューティブ・サージカル(IS)社の「ダヴィンチ」だ。腹腔鏡手術を数多く手がけた医師などから高く評価されているものの、1システム約3億円と高額なうえ、薬事法上、医療器具として承認されていないため、導入している施設は少ない。こうした中、藤田保健衛生大学(愛知県豊明市)は最新モデルの「ダヴィンチSHD」を昨年12月にわが国で初めて導入。宇山一朗教授のチームが消化器外科領域で着々と実績を重ねている。年初来7カ月で21例を手がけ、すべて成功させている宇山教授に医療ロボット活用の狙いや課題、安全面での対策などを聞いた。
宇山一朗教授
15例までは大学が費用を負担
「ダヴィンチ」はロボット部と操作部、助手用のモニターなどで構成。ロボット部には先端に鉗子やメスなどを取り付ける3本のアームと内視鏡が装着されている。術者は箱型の操作部(コンソール)に映し出される内視鏡画像を見ながら遠隔操作する仕組みだ。
「ダヴィンチ」を導入した手術を行っている国内の医療機関は現在、藤田保健衛生大学のほか、東京医科大学、金沢大学、九州大学にとどまる。装置が高価であることに加え、未承認器具であるため保険が適用されないことが導入を阻む要因となっているようだ。
"先行グループ"である東京医大、金沢大、九州大の各病院は前立腺がん手術に対して、薬事法承認前の医療機器の保険診療を一部認める「高度医療評価制度」の指定を昨年12月に受けている。厚生労働省が「ダヴィンチ」の一定の効果を認めたともいえる。
藤田保健衛生大の導入した「ダヴィンチSHD」は第3世代といわれるもので、後述するような多くの利点を備えている。宇山教授は慶應大学時代に治験のために導入された第1世代機に接しているが「当時の腹腔鏡手術を超えるレベルとは思われなかったので強い興味を覚えるまでには至らなかった」という。
その後、4年前に韓国ヨンセイ大学で、進化した第2世代機による手術を見学。「非常に良くなっていると思いはしたが、個人輸入までして薬事法上未承認の機械を輸入することはためらわれた」。
そして、昨年7月、ヨンセイ大学で行われたライブで見た第3世代機が宇山教授に導入を決意させる。9月に大学側に導入申請された「ダヴィンチSHD」は、12月には個人輸入の形で納入にこぎつけた。異例の速さだ。
とはいえ、韓国のように混合診療が行えぬ日本では現状、自費診療を余儀なくされる。このため、宇山教授は院内の倫理委員会と掛け合い、15例までを病院負担で行うという約束を取り付けた。まさに、大学挙げての支援体制が整えられたわけだ。

「ダヴィンチSHD」のコンソール
※クリックで拡大

3本のアームと内視鏡が装着されたロボット部
※クリックで拡大
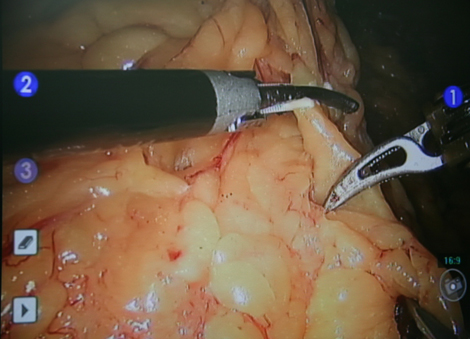
直感的かつ自在に動かせる先端部
第1世代機を初めて見たとき「高をくくっていた」宇山教授が改めて評価する「ダヴィンチ」の実力を示す利点は大別して3つある。(1)直感的な操作感(2)画像の精密度(3)手振れ補正――だ。これらは宇山教授が長年携わってきた腹腔鏡手術の弱点の裏返しでもある。
現在の腹腔鏡手術で使われる鉗子は直線的な動きか円方向の動きしかできないが「ダヴィンチ」の鉗子は人間の手首並みの自由度(7自由度)を備えている。だから、直感的な操作ができる。
例えば、ビデオゲームのコントローラを使うとき、ジャンプはAボタン、ターンはBボタンを押すという操作は直感的でない。させたい動きと操作の間に「考える」手間を要するからだ。
その点「ダヴィンチ」は操作部分に指を入れると、術野の鉗子が指と同じ動きをする。従って、考えたりトレーニングをしたりする必要がない。思い通りに動く。「この自由度の高さは旧来の腹腔鏡の世界にはない圧倒的な利点」と宇山教授は言い切る。
実力の2つ目は術野がリアルな3D画像で表示されることだ。内視鏡には右目用と左目用の光学系レンズが搭載されているので、術者はコンソールボックスのモニターで奥行きのある体内画像を見ることができる。
例えば、これまでは、2D画像上の肝臓と胃を示されても肝臓が奥で胃が手前にあることは常識的に分かっているので、頭の中で解剖学的に3Dの位置関係を描いていた。そこに手術糸が出てくると分かりにくい。しかし、3D画像は最初から立体的に表示されるため、糸をつまみ損ねるようなことはないという。
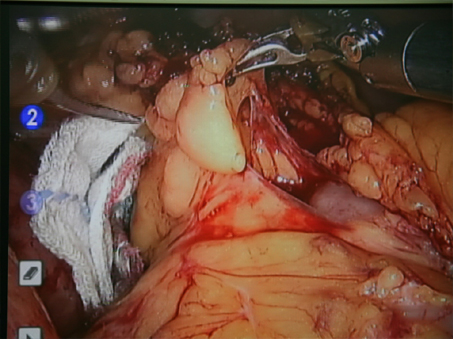
実力の3つ目は手振れの防止機構である。中華箸と普通の箸の使い勝手の差を考えれば分かるが、道具の長さは先端の精度に響く。実際、長い機材の先端は意外に震えているという。その震えを「ダヴィンチ」はコンピュータで補正する。最近のデジタルカメラに搭載されている手振れ防止機能に似た発想だ。「ここぞと思うところでピタッと止まるので非常に正確な操作ができる」という。
スケーリング機能(縮尺機能)を使えば、実際の手指の動きを縮小して器具に伝えることができる。血管や神経などを扱う微細な作業に威力を発揮する。

手術器具を遠隔操作する術者の手元
※クリックで拡大
振れ止め防止機構の働きで精緻な作業ができる
慣れれば触覚は必須条件でない
旧来の腹腔鏡手術の精度を高める装置として「ダヴィンチ」に寄せられる期待は大きい。その利点は前項で触れたとおりだ。半面、寄せられる期待の大きさとは裏腹の弱点も指摘されている。
その1つは一般の腹腔鏡手術で鉗子を通して感じることのできる「触覚」がないことだ。手術は文字通り、手の感触を大切にする。開腹の場合はもちろん、腹腔鏡下でも重視されてきた。その「触覚」が「ダヴィンチ」ではシステム上、術者に伝わらない。
一方で、腹腔鏡下では画像を頼りにしているので「腹腔鏡手術を数多く経験している術者であれば、触覚がないことに大きな戸惑いはないはず」と宇山教授はいう。むしろ「触覚のなさを補って余りある3Dのリアルな画像があるので、ほとんど問題にならない」。
また、視野角の狭さを問題視する向きもある。もともと、心臓外科や泌尿器科のための手術を想定して開発された経緯があるだけに手術の内容によっては全体像の見づらさがストレスを感じさせることもあるだろう。
とはいえ、ロボットは術者の代理人ではなく、あくまでも手術を支援する「ツール」であることは自明だ。それを使いこなせる術者あっての「ツール」である。
「ダヴィンチ」を用いた手術が開腹手術に対して比較にならぬほど症例数の少ない術式であることは論を待たない。この際は、欠点や弱点をあげつらうよりも、まずは術者が実践を通して、改善のための工夫を重ね、使いこなせる術者や適用できる症例を増やすことに力を注ぐべきであろう。

支援ロボットの導入は
手術室の人の配置や動きを変えた
※クリックで拡大
手術中の様子。術者には3D画像として見える
ハード、ソフトの双方で安全対策
「ダヴィンチ」の利点と弱点を踏まえた上で、見落としてはならないのが安全対策だ。藤田保健衛生大が導入にあたって最も気を遣った点でもある。1つ間違えばこれまでに築いてきた「内視鏡手術の藤田」の歴史と評価が一瞬にして消え去るからだ。
「ダヴィンチ」にはハード、ソフトの双方から二重三重の安全対策が施されている。ハード面の一例を挙げると、コンソールの内側に走らせた赤外線がセキュリティシステムと連動する仕組みがある。顔を通して赤外線が認識しないと一種のロックがかかるため、機械を動かせない。IS社によれば、こうしたセキュリティシステムが功を奏し、世界で活躍する1,200台が行った10万件以上の手術で機械トラブルによる事故は皆無であるという。
ソフト面の対策では、導入前に行われる徹底的な事前訓練がある。たとえ購入しても、この訓練を受けないと使用できない。訓練は外科医2人、看護師、臨床検査技師各1人の計4人で3日間受ける。初日にIS社認定病院で手術を見学し、残り2日間で、ブタを使った臓器摘出などを体験する。
一連の安全対策は、ロボットの普及を妨げるような医療事故は絶対に起こさせないというIS社の強い意志の表れといえよう。

顔を入れるフレームには
安全対策の赤外線が走る
※クリックで拡大

契約上、徹底した事前訓練をパスしないと
手術ができない
※クリックで拡大
簡単な手術に使うのは無意味
宇山教授は7月31日現在、総数21例の手術に「ダヴィンチ」を用いている。消化器系の手術数では最高だ。内訳は胃がん摘出16例、食道がん摘出5例。導入時に取り付けた全額病院負担の手術数は15例だから、6例が自己負担で行われたことになる。概ね200万円前後を支払う人がいるということだ。「ダヴィンチ」による手術に対する信頼の高さを裏付ける数字といえるだろう。
専門の上部消化管を対象とする手術で「ダヴィンチ」による実績を重ねた宇山教授が次に照準を合わせているのは大腸外科と泌尿器科手術(前立腺)の立会いである。それらを軌道に乗せた後、婦人科や肺外科などに適用範囲を広げ、各科に横展開していく考えだ。
各科で一斉に立ち上げるのではなく、1つずつの症例を確認しながら次の科にバトンを渡すという考え方は安全対策の一環である。
背景には「ダヴィンチ」による手術を消化器外科に限定せず、ロボット手術のメインに据えていきたいという藤田保健衛生大の構想がある。その意味で、宇山教授に課せられた期待と責任は重い。
「将来的には普通の腹腔鏡では難しいといわれる、膵臓などの手術にも使いたい。従来の術式で簡単にできる手術に、わざわざダヴィンチを使っても意味がない」。
わが国のロボット支援手術の旗振り役の一人である宇山教授だが、その心構えは冷静だ。「ロボットはあくまでもツールの1つだが、残念ながら、CTやMRIのように必要不可欠な装置とはいえない。しかし、便利なツールなら使ったほうがよい。導入が盛んな韓国の例を見ても将来はどんどん増えていくと思う。そのための道筋をつけるのが私の役目」。
立ちはだかる薬事法の壁を突き崩すための環境整備と実績の積み重ねが普及を促す必須条件であることは明らかだ。
プロフィール
宇山一朗(うやま・いちろう)氏略歴
1985年3月岐阜大学医学部卒業、4月慶應義塾大学外科学教室入局。86年5月練馬総合病院外科勤務、87年5月国家公務員等共済組合連合会立川病院外科勤務、88年5月慶應義塾大学外科学教室助手、91年5月練馬総合病院外科医長。97年5月藤田保健衛生大学医学部外科学講師、2002年4月同助教授、06年5月同教授。専門分野は上部消化管外科、内視鏡外科。王貞治前福岡ソフトバンクホークス監督の胃がん手術の執刀医としても有名。1960年9月、徳島県生まれ。
連絡先:藤田保健衛生大学病院
〒470-1192 愛知県豊明市沓掛町田楽ヶ窪1-98
TEL:0562-93-2111(代表)
URL:http://www.fujita-hu.ac.jp/~stomach/index.html





